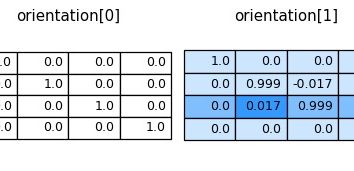
La version 0.14 de Kinetics Toolkit a été publiée ! C’est une version assez importante, surtout pour son lecteur 3D interactif qui peut désormais être entièrement scripté et stylisé. Il
Nous avons fait un grand pas aujourd’hui au Centre de recherche interdisciplinaire en réadaptation du Montréal métropolitain (CRIR) sur le développement de notre simulateur de fauteuil roulant, avec un deuxième
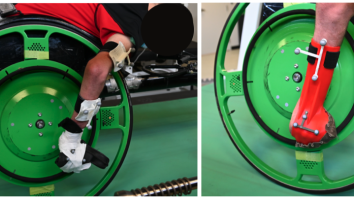
Hier, nous avons testé le premier prototype d’un système d’attache instrumentée développé par INÉDI, pour notre simulateur de propulsion en fauteuil roulant manuel. C’était un premier “reality check”, où on
Dans un projet collaboratif avec INÉDI | CCTT en design industriel et mon laboratoire, nous avons conçu des gants de course en fauteuil roulant rigides, spécialement adaptés à un athlète
Félicitations à Clément Ghazouani pour sa soutenance de maîtrise intitulée “Développement d’un outil calculant en temps réel les moments de réaction articulaires aux épaules durant la propulsion en fauteuil roulant
Je suis très heureux d’annoncer deux nouvelles majeures concernant le projet Kinetics Toolkit (https://kineticstoolkit.uqam.ca) : Site Internet Le site Web a été mis à jour et propose désormais un livre
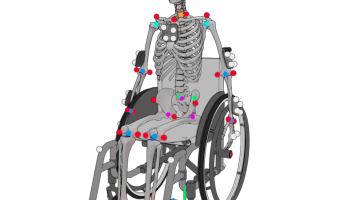
Nous venons tout juste de déposer le pre-print d’un travail de recherche sur l’estimation du centre de masse à l’aide d’appareils de capture du mouvement, chez les personnes assises dans
Je suis très heureux d’être lauréat du Prix d’excellence en enseignement de la Faculté des sciences de l’UQAM. Toutes mes félicitations aux autres récipiendaires qui impressionnent par leur dévouement !
Félicitation à Ilona Alberca pour sa présentation intitulée Ergonomie du fauteuil roulant de badminton. Ilona a présenté cet exposé lors du concours Ma thèse en 180 secondes à la journée
Merci à Kéven Breton et à toute l’équipe de Ça me regarde pour m’avoir reçu à leur émission à AMI-télé. J’y parle entre autres du projet de simulateur de propulsion
Deux nouvelles sections sont maintenant disponibles dans le livre électronique Learning Python for Biomechanics sur le site Web de KTK (https://kineticstoolkit.uqam.ca) : Matplotlib NumPy Le tout avec de nombreux exemples
Voir l’article de Mme Lucie Ferré sur les travaux du laboratoire, dans le journal Le Métro : https://journalmetro.com/actualites/montreal/2963622/favoriser-une-meilleure-sante-pour-les-personnes-en-fauteuil-roulant/
Cette dernière fin de semaine, nous avons reçu 13 athlètes de rugby fauteuil et de tennis fauteuil, dans le cadre d’un projet en partenariat avec Parasports Québec, qui vise à
Voici un aperçu du laboratoire de simulation de propulsion en fauteuil roulant en construction, à l’Institut universitaire sur la réadaptation en déficience physique de Montréal. Dans le cadre du projet
Nous venons de publier cet article dans Clinical Biomechanics : Nous avons déterminé que lors du dribble au basketball en fauteuil roulant : les athlètes ralentissent et propulsent moins fort, même si
Description du projet La mission du Laboratoire de recherche en mobilité et sport adapté (https://felixchenier.uqam.ca) est d’accroître les connaissances fondamentales sur les interactions biomécaniques entre la personne, son aide technique
Grâce au travail acharné de Léa, nous avons maintenant une plateforme d’inclinaison pour fauteuil roulant fonctionnelle, qui utilise un système D-Box (un système similaire aux sièges de cinéma motorisés dans
Type d’emploi : Temps partiel, deux jours par semaine (souple). Début : Dès que possible. Durée : 1 an, renouvelable. Lieu de travail : Pavillon des Sciences Biologiques, Université du Québec à Montréal (UQAM).
Bonne nouvelle ! Kinetics Toolkit, notre librairie open-source de traitement de données biomécaniques sous Python, possède maintenant son article dans Journal of Open Source Software. N’hésitez pas à y jeter